
越來越多的自動化廠家使用工業機器人來完成任務,不僅提高工人的安全性,還增加總產量�,同時減少浪費和運營成本�。隨著工業機器人在制造環境中變得越來越普遍�,對不同類型的工業機器人的需求也在不斷增加,以適應特定的應用和行業。小編將和小伙伴們一起探討市場上有哪些類型的工業機器人,它們是如何工作的,以及它們通常用于哪些應用或行業�。
直角坐標機器人
直角坐標機器人也被稱為線性機器人或龍門機器人����,是在三個線性軸上工作的工業機器人��,使用直角坐標系(X�、Y和Z)�����,這意味著它們在3軸(上下、內外和左右)上直線移動。
很多廠家選擇直角坐標機器人是因為其配置高度靈活����,使用戶有能力調整機器人的速度����、精度�����、行程長度和尺寸�。
直角坐標機器人是工業應用中最常用的機器人類型之一��,經常被用于數控機床和3D打印�����。

直角坐標機器人
四軸機器人
四軸機器人在三個軸(X,Y和Z)上運行��,并且也有旋轉運動��;它擅長橫向移動��,通常比直角坐標機器人移動更快,更容易集成�。
通常��,四軸機器人用于組裝和碼垛,以及生物醫學應用�。

四軸機器人
關節機器人
關節機器人的機械運動和結構非常類似于人的手臂���,該臂安裝在帶有扭轉接頭的底座上����。臂本身可以具有從兩個旋轉接頭到十個作為軸的旋轉接頭��,每個額外的接頭或軸允許更大程度的運動。
大多數關節機器人利用四軸或六軸���。關節式機器人的典型應用是裝配、電弧焊�、材料搬運��、機器維護和包裝。

關節機器人
圓柱形機器人
圓柱形機器人在底部有一個旋轉關節和一個連接連桿的棱柱形關節�。機器人有一個圓柱形的工作包�����,這是通過旋轉軸和一個可延伸的臂來實現的����,該臂以垂直和滑動的方式移動��。
由于其緊湊的設計����,圓柱形機器人通常用于緊湊的工作空間,用于簡單的組裝����、機器維護或涂層應用�。
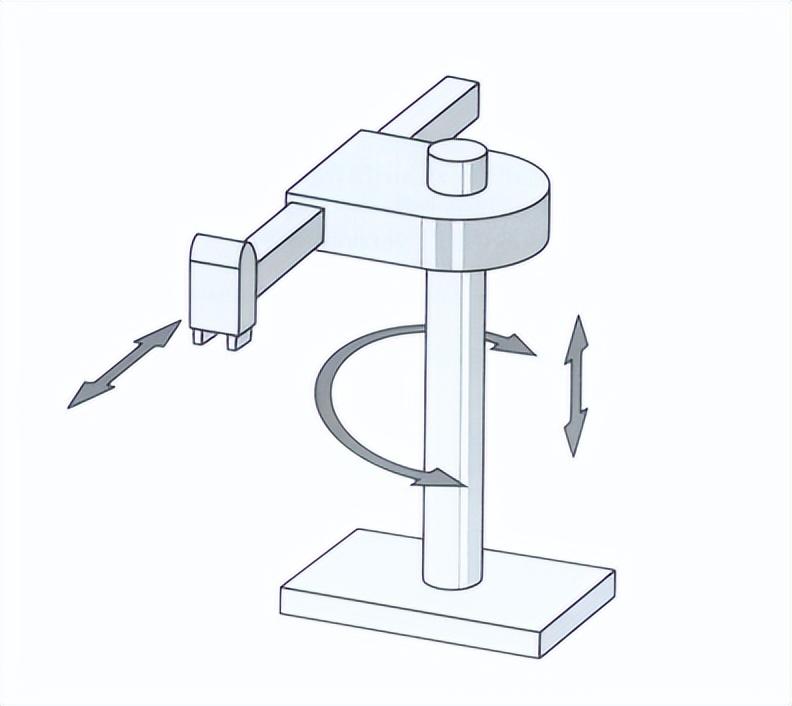
圓柱形機器人
并聯機器人
并聯機器人擁有三個連接到一個單一的基地���,這是安裝在工作區上方的手臂��。由于末端執行器的每個關節都由所有三個手臂直接控制并聯機器人在圓頂形狀中工作��,可以高速精確地移動。
并聯機器人通常用于食品��、制藥和電子行業的快速取放應用����。

并聯機器人
極地機器人
極地機器人的手臂有兩個旋轉關節和一個線性關節��,通過扭轉關節連接到底座���;機器人的軸一起工作以形成極坐標�����,這允許機器人具有球形工作包絡。
極地機器人被認為是最早開發的工業機器人之一,通常用于壓鑄,注塑��,焊接和材料處理��。

極地機器人
協作機器人
協作機器人是可以在共享工作空間中直接和安全地與人類互動的機器人���。它比傳統六軸更具有柔性��,本體集成了若干傳感器,可以與人協作���;通常用于取放、碼垛�����、質量檢測和機器維護���。

協作機器人